- >>兩相步進(jìn)電機(jī)
- >>無刷電機(jī)
- >>三相步進(jìn)電機(jī)
- >>行星減速機(jī)
- >>直流無刷電機(jī)
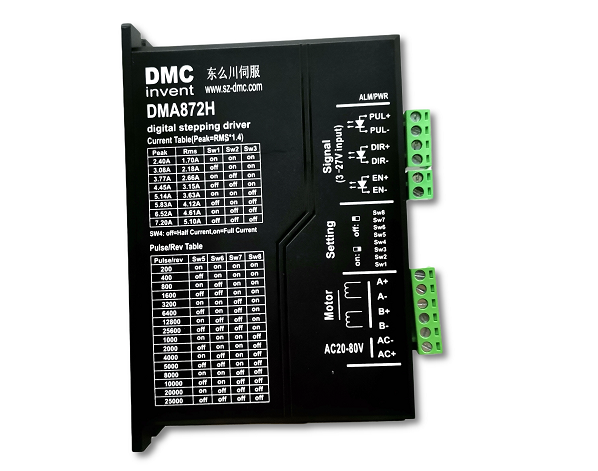
- >>兩相步進(jìn)驅(qū)動器
- >>直流無刷驅(qū)動器
- >>三相步進(jìn)驅(qū)動器
- >>直流無刷伺服驅(qū)動器
- >>韓國GGM電機(jī)減速機(jī)

深圳市東么川伺服控制技術(shù)有限公司
電話:13316379101
郵箱:1355229533@qq.com
地址:深圳市龍華區(qū)民治街道樟坑社區(qū)青創(chuàng)城A棟B502
如何控制步進(jìn)電機(jī)更準(zhǔn)確的在設(shè)備運(yùn)行?
發(fā)布時間:2022-08-02 15:32:32
在驅(qū)動當(dāng)今世界的許多技術(shù)中,您會發(fā)現(xiàn)步進(jìn)電機(jī)在廣泛應(yīng)用。這些相對簡單但高效的電機(jī)是許多不同應(yīng)用的絕佳選擇,包括使用機(jī)器人組件的制造應(yīng)用。
然而,步進(jìn)電機(jī)需要能夠提供精確操作控制程度的控制系統(tǒng),從而產(chǎn)生準(zhǔn)確和精確的機(jī)器人運(yùn)動。當(dāng)工程師設(shè)計這些控制系統(tǒng)時,他們需要特別注意控制器的設(shè)計和用于容納它的電氣外殼。
我們將深入探討步進(jìn)電機(jī)及其應(yīng)用的基礎(chǔ)知識。然后,我們將為設(shè)計和指定電機(jī)控制系統(tǒng)的機(jī)械和電氣工程師討論如何控制步進(jìn)電機(jī)。
什么是步進(jìn)電機(jī)?
步進(jìn)電機(jī)是一種常見的直流供電無刷電機(jī)。要了解步進(jìn)電機(jī)的工作原理以及我們使用它們的原因,您應(yīng)該首先了解一些有關(guān)電動機(jī)工作原理的知識。
電動機(jī)的基本目的是將電能轉(zhuǎn)換為機(jī)械能。為了實(shí)現(xiàn)這一點(diǎn),電動機(jī)使用各種類型的磁體,這些磁體彼此相互作用并導(dǎo)致電動機(jī)的物理組件移動。組件的運(yùn)動使電機(jī)軸轉(zhuǎn)動,電機(jī)軸將機(jī)械能從電機(jī)中轉(zhuǎn)移出來,為系統(tǒng)的其他部分提供動力。
有兩種常用的電動機(jī)類型:有刷電動機(jī)和無刷電動機(jī)。每個都使用不同的方法將電能轉(zhuǎn)換為機(jī)械能:
有刷電機(jī)使用稱為電刷的電觸點(diǎn),將電流傳輸?shù)嚼p繞有金屬線圈的電樞。兩個永久定子磁鐵,一正一負(fù),圍繞著電樞,使通電的電樞旋轉(zhuǎn)。當(dāng)電樞旋轉(zhuǎn)時,其動能使電機(jī)軸轉(zhuǎn)動。
無刷電機(jī)使用多個定子電磁鐵,這些定子電磁鐵圍繞磁化轉(zhuǎn)子排列成一個環(huán)。電磁鐵可以按順序激活和停用,以控制轉(zhuǎn)子的轉(zhuǎn)動并將其定位在與每個磁鐵精確對齊的位置。在這里,轉(zhuǎn)子的旋轉(zhuǎn)產(chǎn)生了轉(zhuǎn)動電機(jī)軸的動能。
您仍然會發(fā)現(xiàn)有刷電機(jī)用于各種應(yīng)用,例如家用電器。然而,無刷電機(jī)在許多其他領(lǐng)域已經(jīng)取代了有刷電機(jī),包括驅(qū)動我們世界的許多數(shù)字技術(shù)。
因此,了解如何控制步進(jìn)電機(jī)以及如何構(gòu)建安全有效地運(yùn)行它們的控制系統(tǒng)非常重要。不過,在我們深入了解它們的工作原理之前,讓我們通過查看步進(jìn)電機(jī)可以提供的優(yōu)勢以及它們常用的應(yīng)用來更好地了解步進(jìn)電機(jī)的使用方式。

步進(jìn)電機(jī)的基本設(shè)計示例。依次激活每個線圈以在轉(zhuǎn)子中產(chǎn)生一致且可預(yù)測的運(yùn)動。
步進(jìn)電機(jī)的優(yōu)點(diǎn)
那么,為什么步進(jìn)電機(jī)通常是機(jī)器人應(yīng)用的有力選擇?以下是步進(jìn)電機(jī)的一些主要優(yōu)勢,使其非常適合機(jī)器人技術(shù):
極其精確地控制電機(jī)運(yùn)動和定位
維護(hù)要求比有刷電機(jī)低得多
在額定速度和負(fù)載下高效可靠地運(yùn)行
比大多數(shù)有刷電機(jī)的占地面積小得多
產(chǎn)生的熱量和電氣噪聲比有刷電機(jī)少得多
單極步進(jìn)電機(jī)一次只為定子線圈環(huán)的一側(cè)供電,價格也相對便宜,這使得它們在電子愛好者和專業(yè)人士中很受歡迎。雙極步進(jìn)電機(jī)也將反向電流傳輸?shù)脚c通電定子線圈相對的線圈,更復(fù)雜且更昂貴。然而,它們更平穩(wěn)和更精確的操作使它們更適合工業(yè)應(yīng)用。
步進(jìn)電機(jī)并不是每個應(yīng)用的正確選擇。如果您的項目需要電機(jī)以非常高的速度(通常超過 2,000 RPM)連續(xù)旋轉(zhuǎn),則步進(jìn)驅(qū)動器中的多個磁極可能會導(dǎo)致出現(xiàn)渦流損耗等情況,從而降低電機(jī)的效率。此外,在如此高的速度下轉(zhuǎn)子上的磨損可能會縮短其使用壽命。
步進(jìn)電機(jī)的機(jī)器人應(yīng)用
步進(jìn)電機(jī)可用于多種應(yīng)用,特別是在機(jī)器人領(lǐng)域。由于步進(jìn)電機(jī)在精確定位和可靠的重復(fù)運(yùn)動方面表現(xiàn)出色,因此它們非常適合需要長時間快速、準(zhǔn)確運(yùn)動的應(yīng)用。步進(jìn)電機(jī)的常見機(jī)器人應(yīng)用包括:
數(shù)控加工
3D 和 2D 打印
紡織品制造
醫(yī)學(xué)影像設(shè)備
硬盤磁盤存儲系統(tǒng)
這些應(yīng)用中的每一個都需要對轉(zhuǎn)子、激光器、打印頭、觸控筆和其他自動化機(jī)器人組件進(jìn)行精確控制。步進(jìn)電機(jī)提供工程師在設(shè)計機(jī)器人系統(tǒng)時所需的精確控制和可靠性。然而,要讓步進(jìn)電機(jī)在這些應(yīng)用中發(fā)揮其潛力,重要的是要牢牢掌握如何使用各種可用的電壓控制方法來控制步進(jìn)電機(jī)。
從根本上說,控制步進(jìn)電機(jī)的基本方法是以正確的順序為圍繞齒輪的線圈通電和斷電。改變線圈激活的順序和時間是工程師如何根據(jù)應(yīng)用需求定制步進(jìn)電機(jī)的操作。
電流流向步進(jìn)電機(jī)的變化會產(chǎn)生極其細(xì)微和精確的定位差異。步進(jìn)電機(jī)的精度取決于它的步數(shù),即它在整個旋轉(zhuǎn)周期中占據(jù)的不同位置的數(shù)量。步數(shù)更多的步進(jìn)電機(jī)將更能產(chǎn)生更精確的定位差異。步進(jìn)電機(jī)可以達(dá)到的精度水平稱為電機(jī)分辨率。
步進(jìn)電機(jī)控制的主要方式有:
Wave Drive/Single Phase: 一個線圈依次激活。這是步進(jìn)電機(jī)最基本的操作模式,產(chǎn)生的分辨率最低。
全步:兩個線圈依次同時啟動,因此轉(zhuǎn)子的極位置實(shí)際上在每個線圈之間。此模式對于提高電機(jī)的扭矩和速度很有用,但它不會提高電機(jī)的分辨率,因為它仍然具有相同的步數(shù)。
半步:激活一個線圈,然后在下一步同時激活兩個線圈。因此,轉(zhuǎn)子一次移動半步,從一個線圈有效時的直接對齊位置到兩個線圈有效時的分裂對齊。這種模式實(shí)際上為電機(jī)的旋轉(zhuǎn)增加了額外的步數(shù),因此它大大提高了分辨率。
微步:使用一系列正弦波脈沖激活線圈,這些脈沖以極小的步長移動轉(zhuǎn)子。由于能夠?qū)⑥D(zhuǎn)子的完整步驟循環(huán)細(xì)分為多達(dá) 256 個步驟,因此該方法產(chǎn)生了此處列出的任何方法中的最高分辨率。微步進(jìn)還可以非常平穩(wěn)和一致地移動轉(zhuǎn)子,這有助于減少電機(jī)部件的振動、噪音和磨損。由于這些優(yōu)點(diǎn),微步進(jìn)是當(dāng)今應(yīng)用中步進(jìn)電機(jī)最常見的激活模式。
還可以通過增加線圈和極數(shù)來提高步進(jìn)電機(jī)的分辨率。專業(yè)工程師使用的大多數(shù)步進(jìn)電機(jī)都有大量的線圈,在微步之前提供大約 200 步。總之,這些選項為使用步進(jìn)電機(jī)的工程師提供了許多不同的選項,以提高電機(jī)分辨率的精度。

每個步進(jìn)電機(jī)都通過驅(qū)動電路進(jìn)行控制,驅(qū)動電路將電流傳輸?shù)骄€圈以激活它們。由于控制步進(jìn)電機(jī)運(yùn)動的整個機(jī)制始于電機(jī)控制器,因此根據(jù)最佳實(shí)踐仔細(xì)設(shè)計步進(jìn)電機(jī)控制至關(guān)重要。在接下來的部分中,我們將快速了解在設(shè)計步進(jìn)電機(jī)驅(qū)動器電路時需要了解的基礎(chǔ)知識。
步進(jìn)電機(jī)驅(qū)動器選擇的基礎(chǔ)知識
步進(jìn)電機(jī)的驅(qū)動器電路通常連接到微控制器,該微控制器為電機(jī)操作員提供對發(fā)送到線圈的電壓脈沖的控制。步進(jìn)驅(qū)動電路有許多不同的選項,包括一些設(shè)計用于開箱即用的步進(jìn)控制器型號。其他人則使用像 Arduino Uno 這樣的可編程微控制器,可以使用其開源步進(jìn)控制庫對其進(jìn)行編程。
選擇步進(jìn)電機(jī)驅(qū)動電路時,從四個基本因素入手:
電壓:驅(qū)動器的額定電壓等級應(yīng)多種多樣,因為您可能需要測試不同的電壓才能為您的步進(jìn)電機(jī)找到最佳選擇。
電流:驅(qū)動器的額定電流至少應(yīng)為步進(jìn)電機(jī)額定最大電流的 1.4 倍。
微步進(jìn):驅(qū)動程序應(yīng)該有多個步進(jìn)分辨率選項,以便您可以嘗試不同的微步進(jìn)設(shè)置。
最大步進(jìn)脈沖:驅(qū)動器的額定步進(jìn)脈沖數(shù)量應(yīng)足以使轉(zhuǎn)子以您的應(yīng)用所需的速度轉(zhuǎn)動。
選擇步進(jìn)驅(qū)動器的其他因素
盡管步進(jìn)電機(jī)的設(shè)計相對簡單,但指定正確的步進(jìn)電機(jī)和設(shè)計合適的控制系統(tǒng)可能是一項具有挑戰(zhàn)性的任務(wù)。我們剛剛討論的四個因素可能會受到許多其他值得考慮的因素的影響。
在設(shè)計包含步進(jìn)電機(jī)的系統(tǒng)時,請務(wù)必考慮以下因素:
當(dāng)您的應(yīng)用需要特定的轉(zhuǎn)速和扭矩時,即使考慮了上述條件,匹配正確的電機(jī)和驅(qū)動器也可能具有挑戰(zhàn)性。通常,匹配電機(jī)和驅(qū)動器的最準(zhǔn)確方法是使用具有適當(dāng)速度-轉(zhuǎn)矩曲線的工程軟件。從具有所需電壓和電流特性的驅(qū)動器開始,然后使用您的速度-轉(zhuǎn)矩曲線將其與電機(jī)匹配。
扭矩不匹配是步進(jìn)電機(jī)驅(qū)動設(shè)計中的一個常見問題,可能導(dǎo)致失速(由于扭矩不足)或振動和噪音(由于扭矩過大)。要獲得正確的扭矩量,首先要計算電機(jī)需要執(zhí)行的所需任務(wù)的負(fù)載扭矩。一旦您確定了所需的負(fù)載扭矩,請使用負(fù)載和電機(jī)扭矩匹配技術(shù)來確保您的電機(jī)扭矩處于最佳狀態(tài)。
請記住,步進(jìn)電機(jī)需要全電流才能產(chǎn)生保持扭矩,這意味著步進(jìn)電機(jī)在長時間保持在適當(dāng)位置時會變得非常熱。確保在設(shè)計冷卻系統(tǒng)時考慮到這一點(diǎn)。
雙極步進(jìn)電機(jī)需要比單極步進(jìn)電機(jī)稍微復(fù)雜的驅(qū)動電路,因為它們需要同時將負(fù)電流傳輸?shù)较喾吹木€圈。如果您使用的是雙極步進(jìn)電機(jī),請確保您的驅(qū)動單元能夠控制雙極電機(jī)。
步進(jìn)電機(jī)的控制單元應(yīng)受到電氣外殼的保護(hù),以使其免受環(huán)境危害。根據(jù)電機(jī)的運(yùn)行環(huán)境,其接線盒接線可能會被灰塵和碎屑弄臟或被濺水損壞(以及許多其他可能的危險)。
產(chǎn)品推薦:兩相步進(jìn)電機(jī)


產(chǎn)品推薦:無刷電機(jī)







產(chǎn)品推薦:兩相步進(jìn)驅(qū)動器






產(chǎn)品推薦:直流無刷驅(qū)動器






 地址 ADDRESS
地址 ADDRESS